ਆਟੋਮੈਟਿਕ ਕਿਰਿਆਸ਼ੀਲ ਮਾਪਣ ਯੰਤਰ
ਉਤਪਾਦ ਐਪਲੀਕੇਸ਼ਨ
ਭਵਿੱਖਬਾਣੀ ਨਿਯੰਤਰਣ ਲਈ ਲਾਗੂ ਲਚਕਦਾਰ ਪ੍ਰਣਾਲੀ ਦਾ ਭਵਿੱਖਬਾਣੀ ਨਿਯੰਤਰਣ ਮਸ਼ੀਨ ਟੂਲ ਦੀ ਪ੍ਰੋਸੈਸਿੰਗ ਸਥਿਤੀ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਇੱਕ ਬੰਦ-ਲੂਪ ਮਾਪ ਪ੍ਰਣਾਲੀ ਬਣਾਉਣ ਲਈ ਪ੍ਰੋਸੈਸਿੰਗ ਵਿੱਚ ਮਾਪ ਅਤੇ ਪ੍ਰੋਸੈਸਿੰਗ ਮਾਪ ਨੂੰ ਜੋੜਨਾ ਹੈ ਅਤੇ ਇਹ ਯਕੀਨੀ ਬਣਾਉਣਾ ਹੈ ਕਿ ਰਹਿੰਦ-ਖੂੰਹਦ ਦੀ ਪ੍ਰੋਸੈਸਿੰਗ ਸਥਿਤੀ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕੀਤਾ ਜਾ ਸਕੇ ਅਤੇ ਇਹ ਯਕੀਨੀ ਬਣਾਇਆ ਜਾ ਸਕੇ ਕਿ ਰਹਿੰਦ-ਖੂੰਹਦ ਦੀ ਪ੍ਰੋਸੈਸਿੰਗ ਦਾ ਕੋਈ ਨਿਯੰਤਰਣ ਪ੍ਰਣਾਲੀ ਨਹੀਂ ਹੈ। ਇੱਕ ਮਸ਼ੀਨ ਟੂਲ ਦਾ ਲਚਕਦਾਰ ਨਿਯੰਤਰਣ ਘੱਟੋ-ਘੱਟ ਬੰਦ-ਲੂਪ ਸਿਸਟਮ ਵਿੱਚ ਇੱਕ ਕੰਟਰੋਲਰ ਨਾਲ ਪ੍ਰਾਪਤ ਕੀਤਾ ਜਾ ਸਕਦਾ ਹੈ ਜੋ ਪ੍ਰੋਸੈਸਿੰਗ ਅਤੇ ਪੋਸਟ-ਪ੍ਰੋਸੈਸਿੰਗ ਮਾਪ ਦੇ ਸਮਰੱਥ ਹੈ। ਕੰਪਿਊਟਰ ਨਾਲ ਮਾਪਣ ਵਾਲਾ ਯੰਤਰ, ਉੱਪਰਲੀ ਮਸ਼ੀਨ ਅਤੇ ਹੇਠਲੀ ਮਸ਼ੀਨ ਨਾਲ ਹੋਰ ਸੰਚਾਰ, ਆਟੋਮੈਟਿਕ ਲਾਈਨ ਦੇ ਸਮੁੱਚੇ ਏਕੀਕ੍ਰਿਤ ਪ੍ਰਬੰਧਨ ਨੂੰ ਮਹਿਸੂਸ ਕਰ ਸਕਦਾ ਹੈ। ਇਸ ਲਈ ਤੁਸੀਂ ਰਹਿੰਦ-ਖੂੰਹਦ ਦੀ ਪ੍ਰਕਿਰਿਆ ਕੀਤੇ ਬਿਨਾਂ ਇੱਕ ਬਹੁਤ ਹੀ ਕੁਸ਼ਲ ਆਟੋਮੈਟਿਕ ਉਤਪਾਦਨ ਲਾਈਨ ਬਣਾ ਸਕਦੇ ਹੋ। ਇਸ ਤੋਂ ਇਲਾਵਾ, ਖੋਜ ਲਈ ਵੱਖ-ਵੱਖ ਬਾਹਰੀ ਵਸਤੂਆਂ ਦੇ ਅਨੁਸਾਰੀ ਕਈ ਤਰ੍ਹਾਂ ਦੇ ਸੈਂਸਰ, ਇਹ ਯਕੀਨੀ ਬਣਾ ਸਕਦੇ ਹਨ ਕਿ ਪੂਰਾ ਸਿਸਟਮ ਬਾਹਰੀ ਦੁਆਰਾ ਪ੍ਰਭਾਵਿਤ ਨਾ ਹੋਵੇ।
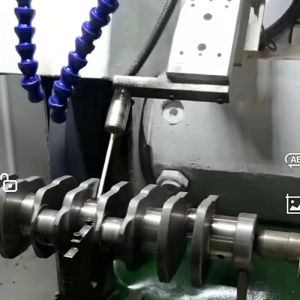
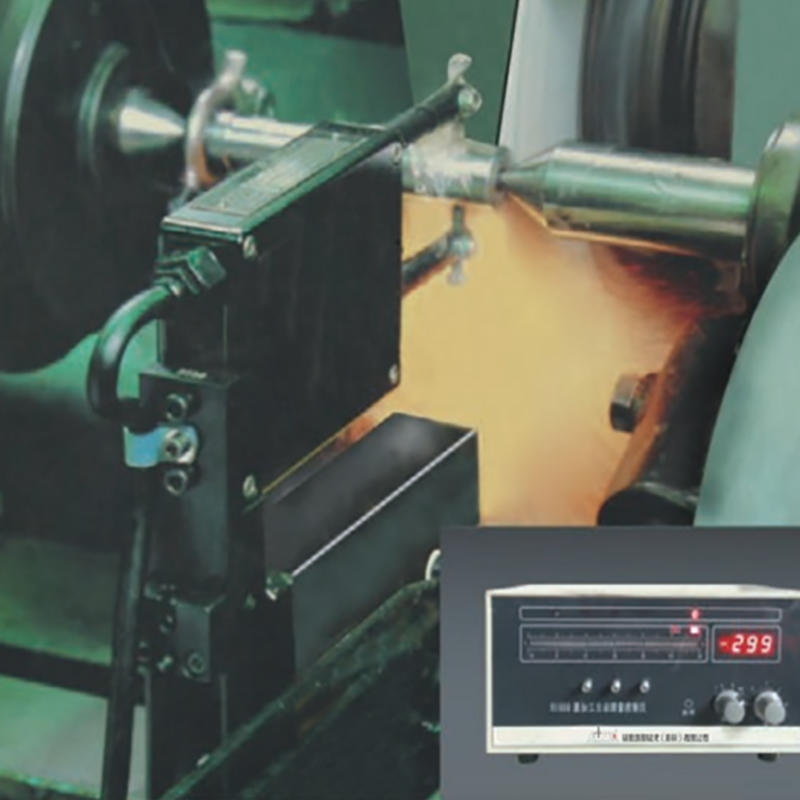
ਕਿਰਿਆਸ਼ੀਲ ਮਾਪ ਦੀ ਇੰਡਿੰਗ ਪ੍ਰਕਿਰਿਆ ਪ੍ਰੋਸੈਸਿੰਗ ਦੌਰਾਨ, ਮਾਪਣ ਵਾਲਾ ਯੰਤਰ ਕਿਸੇ ਵੀ ਸਮੇਂ ਵਰਕਪੀਸ ਨੂੰ ਮਾਪਦਾ ਹੈ ਅਤੇ ਮਾਪ ਦੇ ਨਤੀਜਿਆਂ ਨੂੰ ਕੰਟਰੋਲਰ ਵਿੱਚ ਇਨਪੁੱਟ ਕਰਦਾ ਹੈ। ਪਹਿਲਾਂ ਤੋਂ ਸੈੱਟ ਸਿਗਨਲ ਪੁਆਇੰਟ 'ਤੇ, ਕੰਟਰੋਲਰ ਮਸ਼ੀਨ ਟੂਲ ਦੇ ਸੰਚਾਲਨ ਨੂੰ ਨਿਯੰਤਰਿਤ ਕਰਨ ਲਈ ਇੱਕ ਸਿਗਨਲ ਭੇਜਦਾ ਹੈ। ਉਦਾਹਰਣ ਵਜੋਂ, ਪੀਸਣ ਦੀ ਪ੍ਰਕਿਰਿਆ ਵਿੱਚ, ਮੋਟਾ ਪੀਸਣ ਵਾਲਾ ਫੀਡ, ਜਦੋਂ ਪਹਿਲੇ ਆਕਾਰ ਦਾ ਸਿਗਨਲ ਪੁਆਇੰਟ, ਕੰਟਰੋਲਰ ਸਿਗਨਲ, ਮਸ਼ੀਨ ਟੂਲ ਮੋਟੇ ਪੀਸਣ ਤੋਂ ਬਰੀਕ ਪੀਸਣ ਵਿੱਚ ਬਦਲਦਾ ਹੈ, ਜਦੋਂ ਦੂਜੇ ਆਕਾਰ ਦਾ ਸਿਗਨਲ ਪੁਆਇੰਟ, ਮਸ਼ੀਨ ਟੂਲ ਬਰੀਕ ਪੀਸਣ ਵਾਲੀ ਫੀਡ ਤੋਂ ਹਲਕੇ ਪੀਸਣ (ਕੋਈ ਸਪਾਰਕ ਪੀਸਣ ਨਹੀਂ) ਵਿੱਚ ਬਦਲਦਾ ਹੈ, ਜਦੋਂ ਤੀਜਾ ਸਿਗਨਲ ਪੁਆਇੰਟ, ਵਰਕਪੀਸ ਪ੍ਰੀਸੈਟ ਆਕਾਰ ਵਿੱਚ, ਪੀਸਣ ਵਾਲਾ ਪਹੀਆ ਤੇਜ਼ੀ ਨਾਲ ਵਾਪਸ ਆ ਜਾਂਦਾ ਹੈ, ਅਤੇ ਅਗਲੇ ਚੱਕਰ ਦੀ ਸਟੈਂਡਬਾਏ ਸਥਿਤੀ ਵਿੱਚ ਦਾਖਲ ਹੁੰਦਾ ਹੈ।
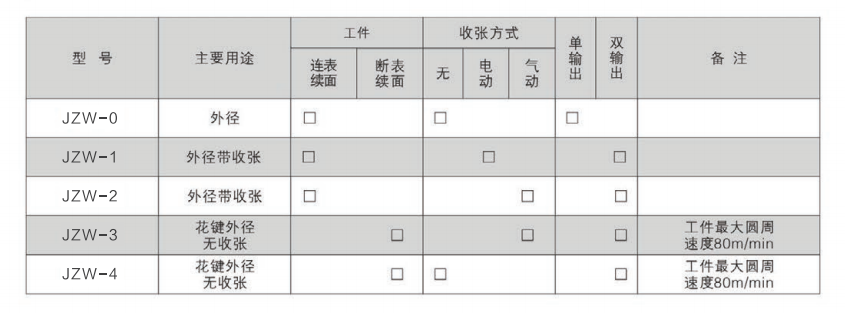
ਉਤਪਾਦ ਪੈਰਾਮੀਟਰ
ਉਤਪਾਦ ਵੀਡੀਓ

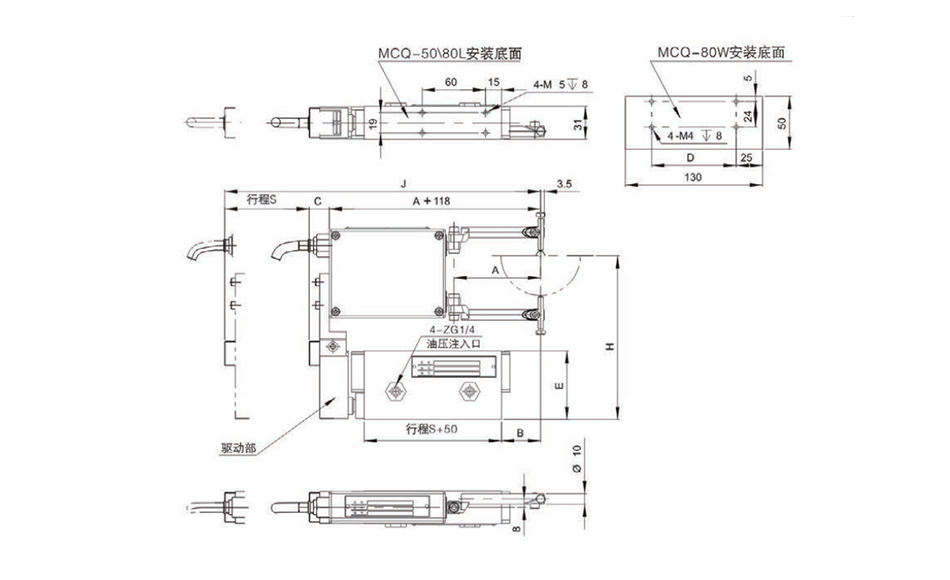
ਉਤਪਾਦ ਦਾ ਆਕਾਰ